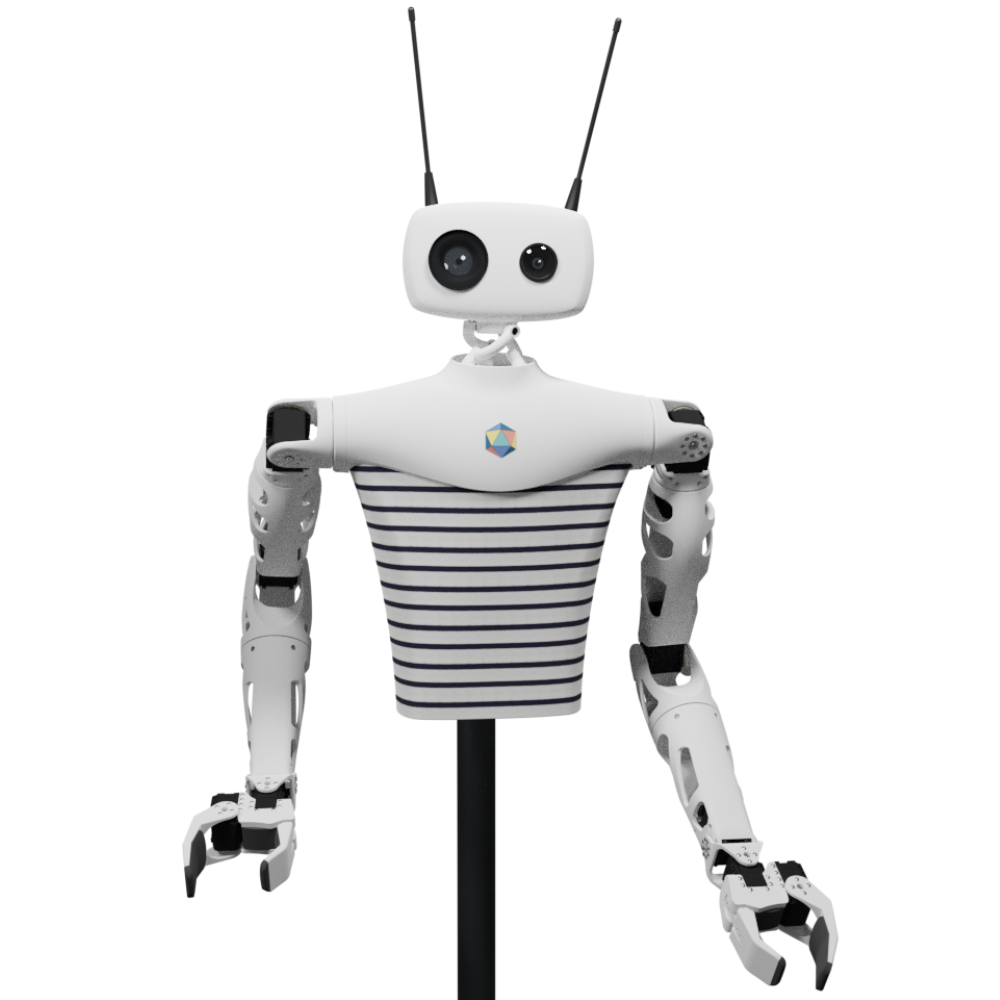
Reachy2 是一款由Pollen Robotics 和 Hugging Face 联合开发的开源人形机器人,旨在通过其强大的 AI 能力和灵活的机械结构,实现自主完成家务和与人类自然互动。
一、主要功能
家务操作:Reachy2 能够通过机器学习算法自主完成家务任务,如摆放物品、递送食物等。
远程操作:支持通过虚拟现实(VR)设备进行远程操作,用户可以实时控制机器人的动作。
物体识别与抓取:配备先进的视觉系统,能够识别和抓取不同形状和大小的物体。
移动与导航:具备可移动底座,能够通过全向轮灵活移动,并利用 LiDAR 进行导航。
人机交互:通过语音识别和空间音频技术,实现自然语言交互。
二、技术原理
仿生机械臂:Reachy2 配备了 7 自由度的仿生机械臂,其运动方式接近人类手臂,能够完成复杂的操作任务。
机器学习与自主学习:通过分析人类操作员的 VR 操作视频,Reachy2 的算法能够学习并掌握任务执行的关键要点。
多传感器融合:集成了 RGB 摄像头、RGB-D 摄像头、IMU 传感器和 LiDAR,实现 3D 立体视觉、深度感知和环境导航。
基于 ROS2 的软件架构:运行在 ROS2 Foxy 系统上,提供 Python SDK 和 VR 远程操作应用程序,方便开发者进行编程和扩展。
三、应用场景
家庭服务:可以完成家务劳动、照顾老人和儿童等任务。
科研与教育:作为 AI 和机器人技术研究的平台,帮助科研人员和学生探索人机交互和机器学习算法。
服务行业:在酒店、餐厅等场所提供引导和递送服务。
工业应用:协助工人完成零部件装配和质量检测等任务。
四、使用方法
硬件组装:根据官方文档组装 Reachy2 的机械臂、底座和传感器。
软件安装:安装 ROS2 和 Reachy2 的 Python SDK,配置 Docker 环境。
远程操作:通过 VR 设备连接 Reachy2 的远程操作应用程序,实时控制机器人。
编程控制:使用 Python SDK 编写脚本,实现机器人的自主行为。
五、适用人群
科研人员:从事 AI 和机器人技术研究的专业人员。
教育工作者和学生:在高校和科研机构中用于教学和实验。
技术开发者:对机器人编程和 AI 应用开发感兴趣的开发者。
家庭用户:希望在家庭中使用机器人完成家务或提供陪伴。
六、优缺点介绍
优点
开源性:完全开源,用户可以自由访问源代码并进行定制。
灵活性高:机械臂和移动底座的设计使其能够适应多种应用场景。
强大的 AI 能力:支持机器学习和自主学习,能够不断优化任务执行。
丰富的开发工具:提供 Python SDK 和 VR 远程操作应用程序,方便开发者快速上手。
缺点
硬件成本较高:作为一款高端科研平台,其硬件成本相对较高。
技术门槛较高:需要一定的机器人技术和编程基础才能充分发挥其功能。
负载能力有限:尽管单臂最大负载可达 3kg,但在工业应用中可能需要更高的负载能力。
分类标签
开源机器人、人形机器人、AI 交互、家庭服务、科研教育
智能好用的AI对话机器人